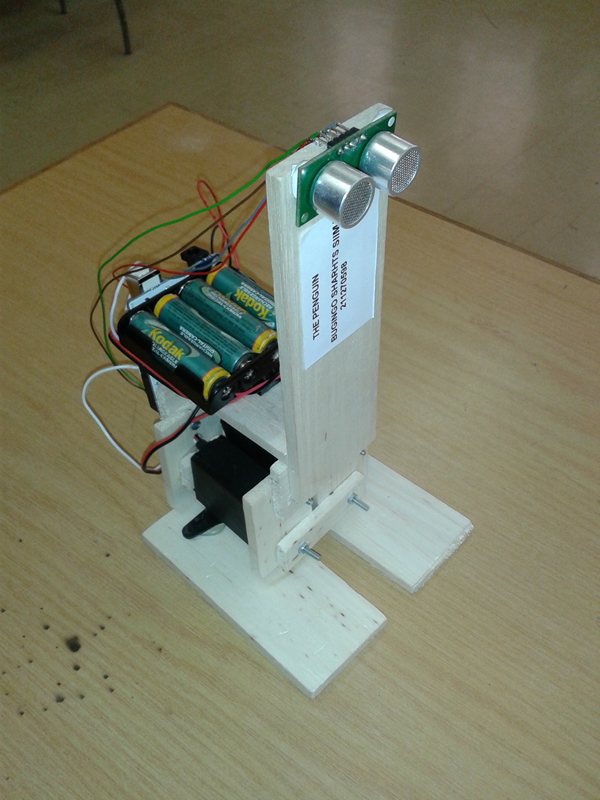
S Bugingo (211270598)
A robot is an electro-mechanical machine that is guided by a computer program or electronic circuitry. It is capable of carrying out a series of complex actions automatically. It senses the world, processes the sensor information with a computer or some other microcontroller and then does something in response to that information such as moving or turning.
This project is on the design and construction of a simple bipedal walker robot which avoids objects. It will however not have and joints at the knees or arms to resemble a human but it is more focused on controlling the walking and the balance of the robot.
Object detection is the action of sensing if there is an obstacle present in the direct path of the robot. It can be measured by mechanical devices that physically interact with the field or by electronic devices that quantify and measure changes in a given environment.
Video Clip
N Mgingi (211147443)
My design project is a pick and place arm robot that can pick an object from one place to another. I was inspired to do this project when I saw a similar project in a video in the internet and was determined to build one of my own. The project is built on a platform that has 3 stations/stands on which the robot will be picking and placing the objects on. These 3 stations have sensors in them to sense when there is an object on the station and when there is no object on the station. The arm will be controlled by the user using a program in a PC to which the arm will be connected to via the RS232IO Controller. When for example the Gripper of the arm has placed an object on one of the stations it will be reflected on the PC Control program Interface. This robot arm uses servo motors for movements around as required (i.e. left, right, up and down and opening the gripper and closing it).
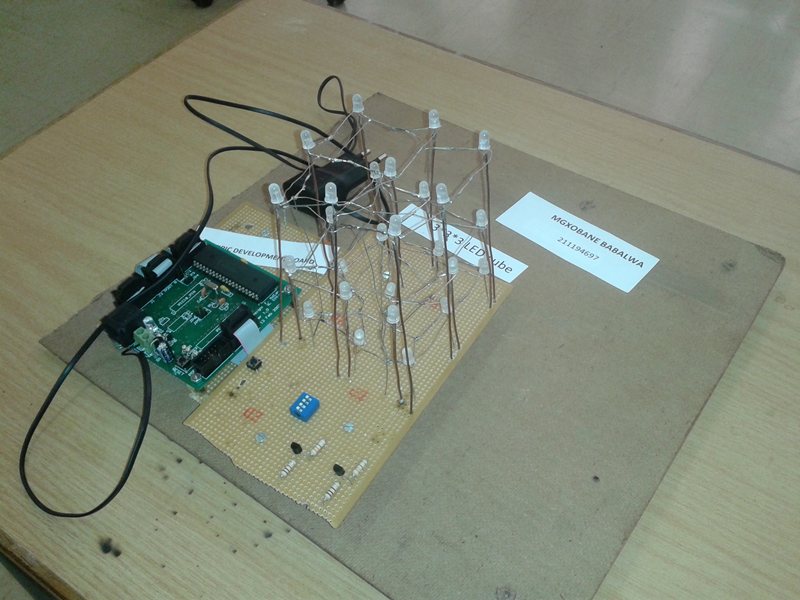
B Mgxobane (211194697)
27 Tricolour leds make up this 3x3x3 led cube, controlled by Pic 18F4620 microcontroller. Each led can display red, green or a combination of both colours which is orange. It is operated by three buttons, when you press button1 you get all leds red and all the animations will be of that red colour, when you press button2 the same thing will happen but the colour will be green, Button3 displays the colour orange (which is a combination of both red and green colours). Pic 18F4620 microcontroller drives the led matrix to create a series of animated patterns by turning on and off leds in sequence and Each led can be addressed individually in software, enabling it to display amazing 3d animations.
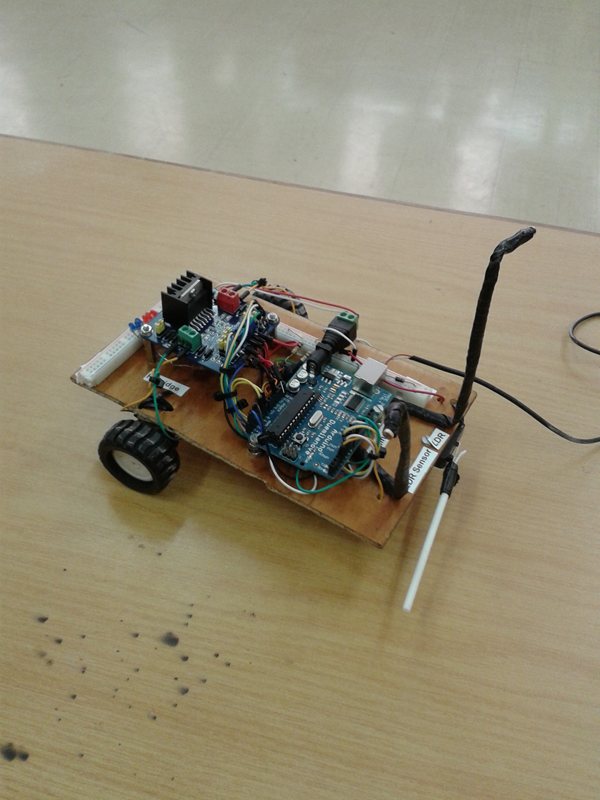
L Mpolongwana (210076534)
In situations where emergencies happen un-expected that require one to evacuate a certain building while it may be dark in that room and the is a little bit of light shining in the nearest exit, the light seeking robot may be of great help in such situations. Because it uses two LDR to find its way, that are both mounted at 45° on both corners of the front of the robot, it is a more convenient way on seeking the brightest and closest light it can find around a room and at the same time trying by all means not to bump into any obstacles. This robot can control the speed of its DC motors with PWM, if the nearest light is very bright and is controlled by an arduino board.
Video Clip
A Ngacu (2090174130)
I introduce to you reader a temperature controller model which is set to control a room temperature to be constant warm. I will control this temperature by setting it to range between 200C minimum and 300C maximum. It will consist of a 230V bulb which acts as heating element whenever the temperature gets below 200C, and 12V fan which act as a cooling object whenever the sensed temperature reaches above 300C. When the temperature sensed is between the ranges required nothing will happen. All this will happen automatically though programming.

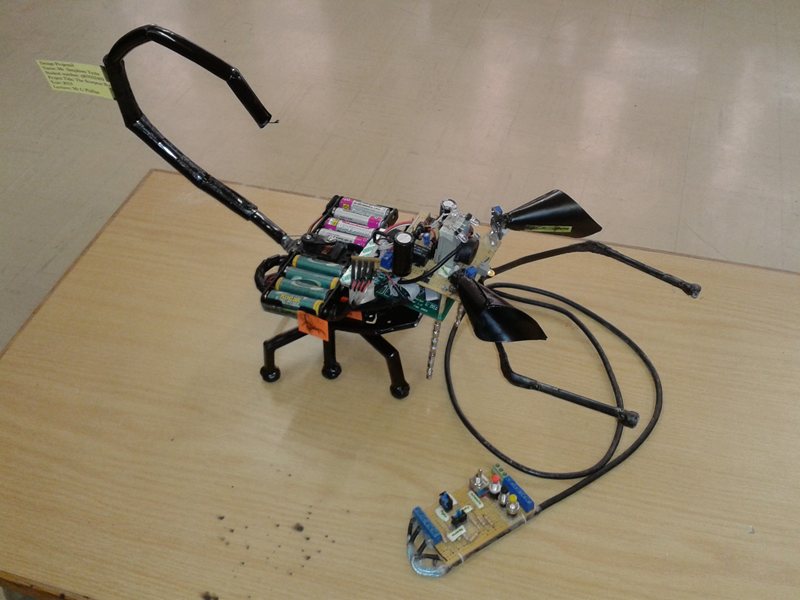
S Tyulu (207035492)
I have always being interested by remote controlled robot since I was a small boy, for my high school science project I have designed and built a four wheel toy car which was using four DC motors controlled by a remote control, so for my final year project I decided to build another robot but this time the robot must walk and operate all its special functions and further on I have to thank Nelson Mandela University for enabling me to pursue my dreams and trusting me with the knowledge of programing which helped me to build a even better design of a walking robot using only six legs. I have spent some time at the toyshops trying to find a cool toy that a kid can love at first sight and a toy that can not be found in any toy store except in my own creative hands, when my nephew was turning 10 years old all I could find was the car with four wheels or robot toy with two legs for his birthday present and that was not interesting enough to me, till I decided to make a robot with more than two legs lets say six legs, and that would be super cool for little boys and girls and actually for every one.